import numpy as np
import tensorflow as tf
def center_to_corner(bbox: np.ndarray, to_all_scale=True, in_hw=None) -> np.ndarray:
"""convert box coordinate from center to corner
Parameters
----------
bbox : np.ndarray
bbox [c_x,c_y,w,h]
to_all_scale : bool, optional
weather to all image scale, by default True
in_hw : np.ndarray, optional
in hw, by default None
Returns
-------
np.ndarray
bbox [x1,y1,x2,y2]
"""
if to_all_scale:
x1 = (bbox[:, 0:1] - bbox[:, 2:3] / 2) * in_hw[1]
y1 = (bbox[:, 1:2] - bbox[:, 3:4] / 2) * in_hw[0]
x2 = (bbox[:, 0:1] + bbox[:, 2:3] / 2) * in_hw[1]
y2 = (bbox[:, 1:2] + bbox[:, 3:4] / 2) * in_hw[0]
else:
x1 = (bbox[:, 0:1] - bbox[:, 2:3] / 2)
y1 = (bbox[:, 1:2] - bbox[:, 3:4] / 2)
x2 = (bbox[:, 0:1] + bbox[:, 2:3] / 2)
y2 = (bbox[:, 1:2] + bbox[:, 3:4] / 2)
xyxy = np.hstack([x1, y1, x2, y2])
return xyxy
def tf_center_to_corner(bbox: tf.Tensor, to_all_scale=True, in_hw=None) -> tf.Tensor:
"""convert box coordinate from center to corner
Parameters
----------
bbox : tf.Tensor
bbox [c_x,c_y,w,h]
to_all_scale : bool, optional
weather to all image scale, by default True
in_hw : tf.Tensor, optional
in hw, by default None
Returns
-------
np.ndarray
bbox [x1,y1,x2,y2]
"""
if to_all_scale:
x1 = (bbox[..., 0:1] - bbox[..., 2:3] / 2) * in_hw[1]
y1 = (bbox[..., 1:2] - bbox[..., 3:4] / 2) * in_hw[0]
x2 = (bbox[..., 0:1] + bbox[..., 2:3] / 2) * in_hw[1]
y2 = (bbox[..., 1:2] + bbox[..., 3:4] / 2) * in_hw[0]
else:
x1 = (bbox[..., 0:1] - bbox[..., 2:3] / 2)
y1 = (bbox[..., 1:2] - bbox[..., 3:4] / 2)
x2 = (bbox[..., 0:1] + bbox[..., 2:3] / 2)
y2 = (bbox[..., 1:2] + bbox[..., 3:4] / 2)
xyxy = tf.concat([x1, y1, x2, y2], -1)
return xyxy
def corner_to_center(bbox: np.ndarray, from_all_scale=True, in_hw=None) -> np.ndarray:
"""convert box coordinate from corner to center
Parameters
----------
bbox : np.ndarray
bbox [x1,y1,x2,y2]
to_all_scale : bool, optional
weather to all image scale, by default True
in_hw : np.ndarray, optional
in hw, by default None
Returns
-------
np.ndarray
bbox [c_x,c_y,w,h]
"""
if from_all_scale:
x = ((bbox[..., 2:3] + bbox[..., 0:1]) / 2) / in_hw[1]
y = ((bbox[..., 3:4] + bbox[..., 1:2]) / 2) / in_hw[0]
w = (bbox[..., 2:3] - bbox[..., 0:1]) / in_hw[1]
h = (bbox[..., 3:4] - bbox[..., 1:2]) / in_hw[0]
else:
x = ((bbox[..., 2:3] + bbox[..., 0:1]) / 2)
y = ((bbox[..., 3:4] + bbox[..., 1:2]) / 2)
w = (bbox[..., 2:3] - bbox[..., 0:1])
h = (bbox[..., 3:4] - bbox[..., 1:2])
xywh = np.hstack([x, y, w, h])
return xywh
def tf_corner_to_center(bbox: tf.Tensor, from_all_scale=True, in_hw=None) -> tf.Tensor:
"""convert box coordinate from corner to center
Parameters
----------
bbox : tf.Tensor
bbox [x1,y1,x2,y2]
to_all_scale : bool, optional
weather to all image scale, by default True
in_hw : tf.Tensor, optional
in hw, by default None
Returns
-------
np.ndarray
bbox [c_x,c_y,w,h]
"""
if from_all_scale:
x = ((bbox[..., 2:3] + bbox[..., 0:1]) / 2) / in_hw[1]
y = ((bbox[..., 3:4] + bbox[..., 1:2]) / 2) / in_hw[0]
w = (bbox[..., 2:3] - bbox[..., 0:1]) / in_hw[1]
h = (bbox[..., 3:4] - bbox[..., 1:2]) / in_hw[0]
else:
x = ((bbox[..., 2:3] + bbox[..., 0:1]) / 2)
y = ((bbox[..., 3:4] + bbox[..., 1:2]) / 2)
w = (bbox[..., 2:3] - bbox[..., 0:1])
h = (bbox[..., 3:4] - bbox[..., 1:2])
xywh = np.concatenate([x, y, w, h], -1)
return xywh
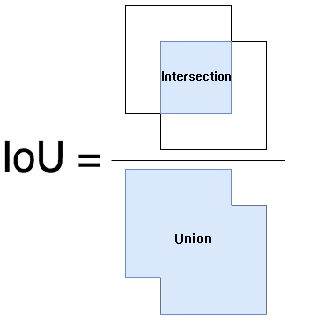
def bbox_iou(a: np.ndarray, b: np.ndarray, offset: int = 0) -> np.ndarray:
"""Calculate Intersection-Over-Union(IOU) of two bounding boxes.
Parameters
----------
a : np.ndarray
(n,4) x1,y1,x2,y2
b : np.ndarray
(m,4) x1,y1,x2,y2
offset : int, optional
by default 0
Returns
-------
np.ndarray
iou (n,m)
"""
tl = np.maximum(a[:, None, :2], b[:, :2])
br = np.minimum(a[:, None, 2:4], b[:, 2:4])
area_i = np.prod(br - tl + offset, axis=2) * (tl < br).all(axis=2)
area_a = np.prod(a[:, 2:4] - a[:, :2] + offset, axis=1)
area_b = np.prod(b[:, 2:4] - b[:, :2] + offset, axis=1)
return area_i / (area_a[:, None] + area_b - area_i)
def tf_bbox_iou(a: tf.Tensor, b: tf.Tensor, offset: int = 0) -> tf.Tensor:
"""Calculate Intersection-Over-Union(IOU) of two bounding boxes.
Parameters
----------
a : tf.Tensor
(n,4) x1,y1,x2,y2
b : tf.Tensor
(m,4) x1,y1,x2,y2
offset : int, optional
by default 0
Returns
-------
tf.Tensor
iou (n,m)
"""
a = a[..., None, :]
tl = tf.maximum(a[..., :2], b[..., :2])
br = tf.minimum(a[..., 2:4], b[..., 2:4])
area_i = tf.reduce_prod(tf.maximum(br - tl, 0) + offset, axis=-1)
area_a = tf.reduce_prod(a[..., 2:4] - a[..., :2] + offset, axis=-1)
area_b = tf.reduce_prod(b[..., 2:4] - b[..., :2] + offset, axis=-1)
return area_i / (area_a + area_b - area_i)
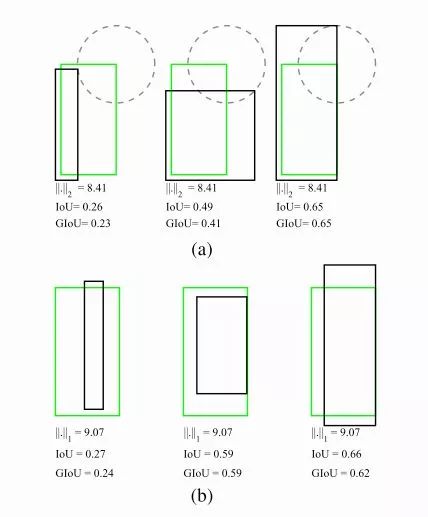
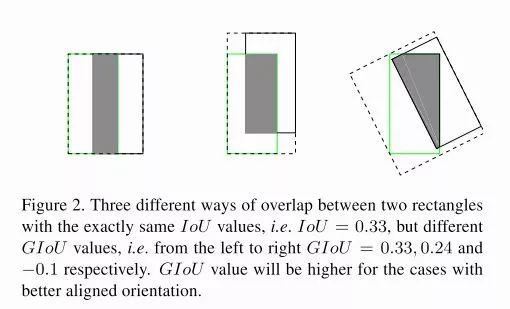
def tf_bbox_giou(a: tf.Tensor, b: tf.Tensor, offset: int = 0) -> tf.Tensor:
"""Calculate GIOU of two bounding boxes.
Parameters
----------
a : tf.Tensor
(n,4) x1,y1,x2,y2
b : tf.Tensor
(m,4) x1,y1,x2,y2
offset : int, optional
by default 0
Returns
-------
tf.Tensor
giou (n,m)
"""
a = a[..., None, :]
tl = tf.maximum(a[..., :2], b[..., :2])
br = tf.minimum(a[..., 2:4], b[..., 2:4])
area_i = tf.reduce_prod(tf.maximum(br - tl, 0) + offset, axis=-1)
area_a = tf.reduce_prod(a[..., 2:4] - a[..., :2] + offset, axis=-1)
area_b = tf.reduce_prod(b[..., 2:4] - b[..., :2] + offset, axis=-1)
outer_tl = tf.minimum(a[..., :2], b[..., :2])
outer_br = tf.maximum(a[..., 2:4], b[..., 2:4])
area_o = tf.reduce_prod(tf.maximum(outer_br - outer_tl, 0) + offset, axis=-1)
union = (area_a + area_b - area_i)
return (area_i / union) - ((area_o - union) / area_o)
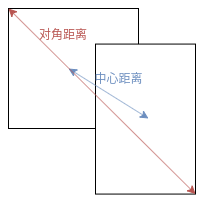
def tf_bbox_diou(a: tf.Tensor, b: tf.Tensor, offset: int = 0) -> tf.Tensor:
"""Calculate DIoU of two bounding boxes.
Parameters
----------
a : tf.Tensor
(n,4) x1,y1,x2,y2
b : tf.Tensor
(m,4) x1,y1,x2,y2
offset : int, optional
by default 0
Returns
-------
tf.Tensor
diou (n,m)
"""
a = a[..., None, :]
tl = tf.maximum(a[..., :2], b[..., :2])
br = tf.minimum(a[..., 2:4], b[..., 2:4])
area_i = tf.reduce_prod(tf.maximum(br - tl, 0) + offset, axis=-1)
area_a = tf.reduce_prod(a[..., 2:4] - a[..., :2] + offset, axis=-1)
area_b = tf.reduce_prod(b[..., 2:4] - b[..., :2] + offset, axis=-1)
iou = area_i / (area_a + area_b - area_i)
outer_tl = tf.minimum(a[..., :2], b[..., :2])
outer_br = tf.maximum(a[..., 2:4], b[..., 2:4])
inter_diag = tf.reduce_sum(tf.square((b[..., :2] + b[..., 2:]) / 2
- (a[..., :2] + a[..., 2:]) / 2 + offset), -1)
outer_diag = tf.reduce_sum(tf.square(outer_tl - outer_br + offset), -1)
return tf.clip_by_value(iou - inter_diag / outer_diag, -1., 1.)
def tf_bbox_ciou(a: tf.Tensor, b: tf.Tensor, offset: int = 0) -> tf.Tensor:
"""Calculate CIoU of two bounding boxes.
Parameters
----------
a : tf.Tensor
(n,4) x1,y1,x2,y2
b : tf.Tensor
(m,4) x1,y1,x2,y2
offset : int, optional
by default 0
Returns
-------
tf.Tensor
ciou (n,m)
"""
a = a[..., None, :]
tl = tf.maximum(a[..., :2], b[..., :2])
br = tf.minimum(a[..., 2:4], b[..., 2:4])
area_i = tf.reduce_prod(tf.maximum(br - tl, 0) + offset, axis=-1)
area_a = tf.reduce_prod(a[..., 2:4] - a[..., :2] + offset, axis=-1)
area_b = tf.reduce_prod(b[..., 2:4] - b[..., :2] + offset, axis=-1)
iou = area_i / (area_a + area_b - area_i)
outer_tl = tf.minimum(a[..., :2], b[..., :2])
outer_br = tf.maximum(a[..., 2:4], b[..., 2:4])
inter_diag = tf.reduce_sum(tf.square((b[..., :2] + b[..., 2:]) / 2
- (a[..., :2] + a[..., 2:]) / 2 + offset), -1)
outer_diag = tf.reduce_sum(tf.square(outer_tl - outer_br + offset), -1)
arctan = tf.stop_gradient(
(tf.math.atan(tf.math.divide_no_nan(b[..., 2] - b[..., 0],
b[..., 3] - b[..., 1]))
- tf.math.atan(tf.math.divide_no_nan(a[..., 2] - a[..., 0],
a[..., 3] - a[..., 1]))))
v = tf.stop_gradient(tf.math.square(2 / np.pi * arctan))
alpha = tf.stop_gradient(v / ((1 - iou) + v))
w_temp = tf.stop_gradient(2 * (a[..., 2] - a[..., 0]))
ar = (8 / tf.square(np.pi)) * arctan * ((a[..., 2] - a[..., 0] - w_temp) * (a[..., 3] - a[..., 1]))
return tf.clip_by_value(iou - (inter_diag / outer_diag + alpha * ar), -1., 1.)
def bbox_iof(a: np.ndarray, b: np.ndarray) -> np.ndarray:
"""Calculate Intersection-Over-Foreground(IOF) of two bounding boxes.
Parameters
----------
a : np.ndarray
(n,4) x1,y1,x2,y2
b : np.ndarray
(m,4) x1,y1,x2,y2
offset : int, optional
by default 0
Returns
-------
np.ndarray
iof (n,m)
"""
lt = np.maximum(a[:, np.newaxis, :2], b[:, :2])
rb = np.minimum(a[:, np.newaxis, 2:], b[:, 2:])
area_i = np.prod(rb - lt, axis=2) * (lt < rb).all(axis=2)
area_a = np.prod(a[:, 2:] - a[:, :2], axis=1)
return area_i / np.maximum(area_a[:, np.newaxis], 1)
def nms_oneclass(bbox: np.ndarray, score: np.ndarray, thresh: float) -> np.ndarray:
"""Pure Python NMS oneclass baseline.
Parameters
----------
bbox : np.ndarray
bbox, n*(x1,y1,x2,y2)
score : np.ndarray
confidence score (n,)
thresh : float
nms thresh
Returns
-------
np.ndarray
keep index
"""
x1 = bbox[:, 0]
y1 = bbox[:, 1]
x2 = bbox[:, 2]
y2 = bbox[:, 3]
areas = (x2 - x1 + 1) * (y2 - y1 + 1)
order = score.argsort()[::-1]
keep = []
while order.size > 0:
i = order[0]
keep.append(i)
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
ovr = inter / (areas[i] + areas[order[1:]] - inter)
inds = np.where(ovr <= thresh)[0]
order = order[inds + 1]
return keep
|