DBSCAN算法原理及实现
因为模式识别需要分组讲一个聚类算法,所以我挑选了这个算法。
介绍
DBSCAN(Density-Based Spatial Clustering of Applications with Noise,具有噪声的基于密度的聚类方法)是一种很典型的密度聚类算法,和K-Means,BIRCH这些一般只适用于凸样本集的聚类相比,DBSCAN既可以适用于凸样本集,也可以适用于非凸样本集。下面我们就对DBSCAN算法的原理做一个总结。
原理
DBSCAN是一种基于密度的聚类算法,这类密度聚类算法一般假定类别可以通过样本分布的紧密程度决定。同一类别的样本,他们之间的紧密相连的,也就是说,在该类别任意样本周围不远处一定有同类别的样本存在。
通过将紧密相连的样本划为一类,这样就得到了一个聚类类别。通过将所有各组紧密相连的样本划为各个不同的类别,则我们就得到了最终的所有聚类类别结果。
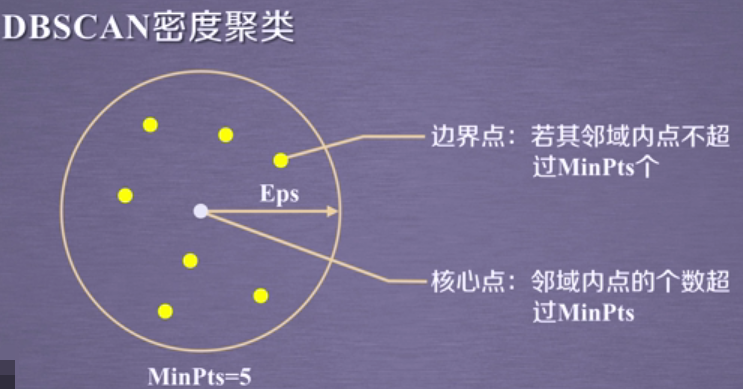
DBSCAN密度定义
DBSCAN类的重要参数也分为两类,一类是DBSCAN算法本身的参数,一类是最近邻度量的参数,下面我们对这些参数做一个总结。
eps: DBSCAN算法参数,即我们的ϵ-邻域的距离阈值,和样本距离超过ϵ的样本点不在ϵ-邻域内。默认值是0.5.一般需要通过在多组值里面选择一个合适的阈值。eps过大,则更多的点会落在核心对象的ϵ-邻域,此时我们的类别数可能会减少, 本来不应该是一类的样本也会被划为一类。反之则类别数可能会增大,本来是一类的样本却被划分开。
MinPts: DBSCAN算法参数,即样本点要成为核心对象所需要的ϵ-邻域的样本数阈值。默认值是5. 一般需要通过在多组值里面选择一个合适的阈值。通常和eps一起调参。在eps一定的情况下,MinPts过大,则核心对象会过少,此时簇内部分本来是一类的样本可能会被标为噪音点,类别数也会变多。反之MinPts过小的话,则会产生大量的核心对象,可能会导致类别数过少。
metric:最近邻距离度量参数。可以使用的距离度量较多,一般来说DBSCAN使用默认的欧式距离(即p=2的闵可夫斯基距离)就可以满足我们的需求。可以使用的距离度量参数有许多。这里我采用欧式距离$ $
DBSCAN图例
C++实现之错误案例
#include <cmath>
#include <fstream>
#include <iostream>
#include <set>
#include <vector>
using namespace std;
#define Dcout(x) cout << #x << ": " << (x) << endl
struct Node {
double x, y;
int pts, clusters, belongto; /* 记录相邻点的个数 所属簇 */
enum { Core= 0, Border= 1, Noise= 2 } tag; /* 初始都定义为噪声点 */
Node() : x(0), y(0), pts(1), clusters(0), tag(Noise) {}
/* 默认簇0为噪声簇 */
Node(double a, double b) : x(a), y(b), pts(1), clusters(0), tag(Noise) {}
};
class DBSCAN {
public:
vector<set<int> *> cluster; /* 簇数组>=1 */
vector<struct Node> a_node; /* 所有点数组 */
// set<int> c_node; /* 核心点数组 */
DBSCAN(double eps, int minpts, vector<struct Node> &l)
: _eps(eps), _minpts(minpts) {
_total= l.size();
a_node= l;
dis= new double *[_total]; /* 申请内存 */
for (int i= 0; i < _total; ++i) { dis[i]= new double[_total]; }
cluster.push_back(new set<int>); /* 簇数组必定大于1 */
}
~DBSCAN() {
delete[] dis;
for (auto &it : cluster) { delete it; }
}
/* @brief 找到所有核心点
*
* */
void FindCore(void) {
for (int i= 0; i < _total; ++i) {
for (int j= i + 1; j < _total; ++j) {
dis[i][j]= EuclideanDis(a_node[i], a_node[j]);
if (dis[i][j] <= _eps) { /* 距离小于设定值 */
a_node[i].pts++; /* 点计数加一 */
a_node[j].pts++;
/* 设置tag */
SetTag(i);
SetTag(j);
}
}
}
}
/* @brief 将核心点联通
*
* */
void ConncetCore(void) {
for (int i= 0; i < _total; ++i) {
for (int j= i + 1; j < _total; ++j) {
if (a_node[i].tag == Node::Core &&
a_node[j].tag == Node::Core) {
if (dis[i][j] <= _eps) {
/* 如果核心点联通就添加到同一簇中 */
InsertCluster(i, j);
}
}
}
}
}
/* @brief 添加标签
*
* */
void AddLabel(void) {
for (int i= 0; i < cluster.size(); ++i) {
for (auto j= cluster[i]->begin(); j != cluster[i]->end(); ++j) {
a_node[*j].clusters= i + 1; /* 为点打标签 */
}
}
}
private:
double _eps; /* 半径 */
int _total, _minpts; /* 总数 最小密度 */
double **dis; /* 距离数组 */
/* @brief 求解欧氏距离
*
* */
inline double EuclideanDis(const struct Node &a, const struct Node &b) {
return sqrt(((a.x - b.x) * (a.x - b.x)) + ((a.y - b.y) * (a.y - b.y)));
}
inline void SetTag(int &a) {
if (a_node[a].pts > 0 && a_node[a].pts < _minpts) {
a_node[a].tag= Node::Border;
}
if (a_node[a].pts >= _minpts) { a_node[a].tag= Node::Core; }
}
inline void InsertCluster(const int &a, const int &b) {
for (size_t i= 0; i < cluster.size(); ++i) {
if (cluster[i]->empty()) { /* 此集合为空直接加入 */
cluster[i]->insert(a);
cluster[i]->insert(b);
return;
}
if (cluster[i]->count(a) || cluster[i]->count(b)) {
/* 找到元素直接都加入 */
cluster[i]->insert(a);
cluster[i]->insert(b);
return;
}
}
/* 如果之前的簇中都没有相通的 */
cluster.push_back(new set<int>);
cluster.back()->insert(a);
cluster.back()->insert(b);
}
};
int main(int argc, char const *argv[]) {
vector<struct Node> nodes;
ifstream fin("in"); //读取文件
if (!fin) { return -1; }
char s[100];
for (double x, y; fin.getline(s, 100);) {
sscanf(s, "%lf,%lf", &x, &y);
nodes.push_back(Node(x, y));
}
DBSCAN dbscan(0.1, 10, nodes); /* 设置eps 以及 minpts */
dbscan.FindCore(); /* 寻找核心节点 */
dbscan.ConncetCore(); /* 联通核心点 */
dbscan.AddLabel(); /* 添加类别标签 */
ofstream fout("out"); //创建一个输出的文件
if (!fout) { return -1; }
for (auto &it : dbscan.a_node) { //将变量的值写入文件
if (it.tag == Node::Border) {
it.clusters= dbscan.a_node[it.belongto].clusters;
}
fout << it.clusters << endl;
}
fout.close(); //关闭文件
return 0;
}错误图像
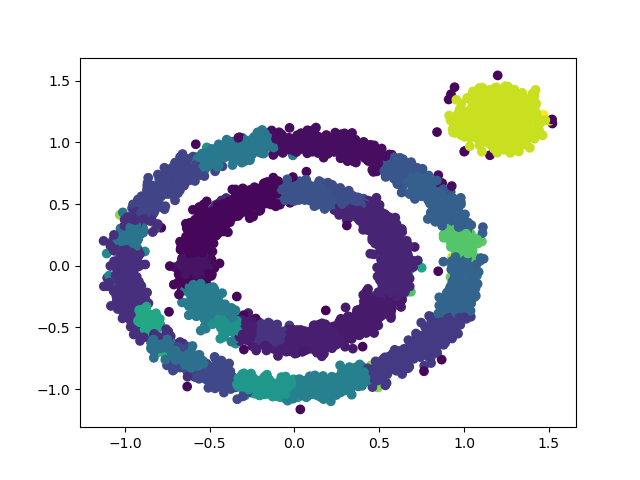 可以发现当前参数被分为多个类。我找了半天才发现,原来是我加入簇中的时候,只循环遍历了所有簇中有没有该元素,但是忽略了一点,有可能此前的两个簇,都是互不相交的。但是到最后的两个元素,另其突然相交了。所以需要修改加入簇的操作。
可以发现当前参数被分为多个类。我找了半天才发现,原来是我加入簇中的时候,只循环遍历了所有簇中有没有该元素,但是忽略了一点,有可能此前的两个簇,都是互不相交的。但是到最后的两个元素,另其突然相交了。所以需要修改加入簇的操作。
正确程序
#include <cmath>
#include <fstream>
#include <iostream>
#include <set>
#include <stack>
#include <vector>
using namespace std;
#define Dcout(x) cout << #x << ": " << (x) << endl
struct Node {
double x, y;
int pts, cluster; /* 记录相邻点的个数 所属簇 */
bool visited= false;
vector<int> contains;
enum { Core= 0, Border= 1, Noise= 2 } tag; /* 初始都定义为噪声点 */
Node() : x(0), y(0), pts(1), cluster(0), tag(Noise) {}
/* 默认簇0为噪声簇 */
Node(double a, double b) : x(a), y(b), pts(1), cluster(-1), tag(Noise) {}
Node(double a, double b, int c)
: x(a), y(b), pts(1), cluster(c), tag(Noise) {}
};
class DBSCAN {
public:
vector<set<int> *> cluster; /* 簇数组>=1 */
vector<Node> a_node; /* 所有点数组 */
vector<Node *> c_node; /* 核心点数组 */
DBSCAN(double eps, int minpts, vector<struct Node> &l)
: _eps(eps), _minpts(minpts) {
_total= l.size();
a_node= l;
dis= new double *[_total]; /* 申请内存 */
for (int i= 0; i < _total; ++i) { dis[i]= new double[_total]; }
}
~DBSCAN() { delete[] dis; }
/* @brief 找到所有核心点
*
* */
void FindCore(void) {
for (int i= 0; i < _total; ++i) {
for (int j= i + 1; j < _total; ++j) {
dis[i][j]= EuclideanDis(a_node[i], a_node[j]);
if (dis[i][j] <= _eps) { /* 距离小于设定值 */
a_node[i].pts++; /* 点计数加一 */
a_node[j].pts++;
}
}
}
for (int i= 0; i < _total; ++i) { /* 核心点加入核心点数组 */
if (a_node[i].pts >= _minpts) {
a_node[i].tag= Node::Core;
c_node.push_back(&a_node[i]);
}
}
}
/* @brief 将核心点联通
*
* */
void ConnectCore(void) {
for (int i= 0; i < c_node.size(); ++i) {
for (int j= i + 1; j < c_node.size(); ++j) {
/* 将所有直接相通的core连接 */
if (EuclideanDis(*c_node[i], *c_node[j]) < _eps) {
c_node[i]->contains.push_back(j);
c_node[j]->contains.push_back(i);
}
}
}
}
void DFSCore(void) {
/* 使用DFS进行遍历并加入簇中 */
int cnt= -1;
for (int i= 0; i < c_node.size(); i++) {
stack<Node *> ps;
if (c_node[i]->visited) continue;
++cnt;
a_node[c_node[i]->cluster].cluster= cnt;
// Dcout(c_node[i]->cluster);
ps.push(c_node[i]);
Node *v;
while (!ps.empty()) {
v= ps.top();
v->visited= 1;
ps.pop();
/* 这里的有个问题在于起始点不一定是母节点 */
/* 并且也没有保存母节点,导致母节点没有被分类 */
for (int j= 0; j < v->contains.size(); j++) {
if (c_node[v->contains[j]]->visited) continue;
c_node[v->contains[j]]->cluster= cnt;
c_node[v->contains[j]]->visited= true;
ps.push(c_node[v->contains[j]]);
}
}
}
}
void AddBorder(void) {
/* 最后把边界点也加入簇中 */
for (int i= 0; i < _total; ++i) {
if (a_node[i].tag == Node::Core) { continue; }
if (a_node[i].tag == Node::Noise) { a_node[i].cluster= -1; }
for (int j= 0; j < c_node.size(); ++j) {
if (EuclideanDis(a_node[i], *c_node[j]) < _eps) {
a_node[i].tag= Node::Border;
a_node[i].cluster= c_node[j]->cluster;
break;
}
}
}
}
private:
double _eps; /* 半径 */
int _total, _minpts; /* 总数 最小密度 */
double **dis; /* 距离数组 */
/* @brief 求解欧氏距离
*
* */
inline double EuclideanDis(const struct Node &a, const struct Node &b) {
return sqrt(((a.x - b.x) * (a.x - b.x)) + ((a.y - b.y) * (a.y - b.y)));
}
};
int main(int argc, char const *argv[]) {
vector<struct Node> nodes;
ifstream fin("in"); //读取文件
if (!fin) {
return -1;
} else {
int i= -1;
char s[100];
for (double x, y; fin.getline(s, 100);) {
sscanf(s, "%lf,%lf", &x, &y);
nodes.push_back(Node(x, y, ++i));
}
}
DBSCAN dbscan(0.1, 10, nodes); /* 设置eps 以及 minpts */
dbscan.FindCore(); /* 寻找核心节点 */
dbscan.ConnectCore(); /* 连接核心节点 */
dbscan.DFSCore(); /* DFS遍历并设置类别 */
dbscan.AddBorder(); /* 将边界点加入 */
ofstream fout("out"); //创建一个输出的文件
if (!fout) {
return -1;
} else {
for (auto &it : dbscan.a_node) { //将变量的值写入文件
fout << it.cluster << endl;
}
fout.close(); //关闭文件
}
return 0;
}思路
现在的思路是将所有的核心节点构造成网络图,通过DFS遍历的方式,确定所有簇
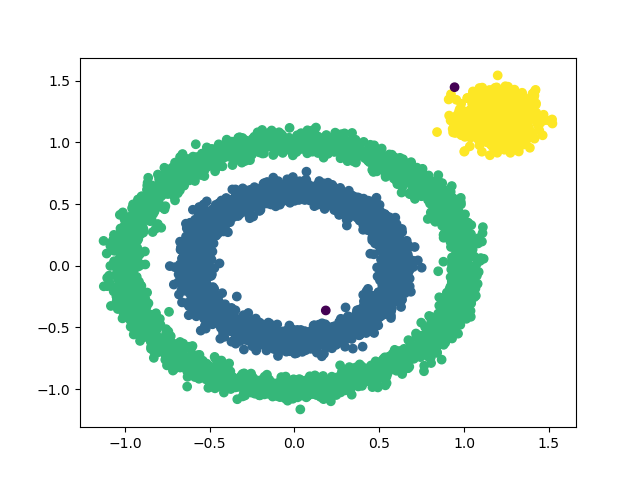
正确图像