EM算法与EM路由
搞定了yolo,终于可以学习点新的东西了。今天就学习一波胶囊网络中的EM路由。 先推荐一个课程资料,杜克大学的统计学课程,从python讲到c++,从矩阵计算讲到概率统计,从jit讲到cuda编程。看看人家本科生学的东西。。。
EM算法
詹森不等式
对于一个凸函数\(f\),\(E[f(x)]\geq f(E[x])\),将其反转获得一个凹函数。 如果一个函数\(f(x)\)在区间内都有\(f''(x)\geq 0\),那么它是一个凸函数。例如\(f(x)=log\ x\),\(f''(x)=-\frac{1}{x^2}\),说明他在\(x\in (0,+ \infty]\)是一个凸函数,詹森不等式的直观说明如下。
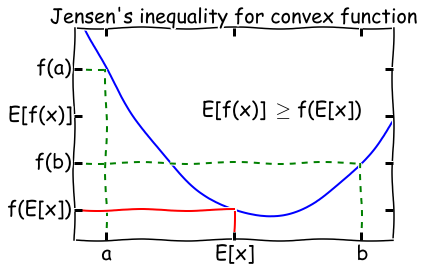
其实只有当\(f(x)\)为常数时,詹森不等式才会相等。
这里使用概率论表述的\(E\),其实际就是积分。也就是说先经过凸函数的期望值必然大于等于期望的凸函数值。
完整信息的最大似然
设置一个实验,硬币A向上的概率为\(\theta_A\)的,硬币B向上的概率为\(\theta_B\),接着一共做m此实验,每次实验随机选择一个硬币,投掷n次,并记录向下和向下的次数。如果我们记录了每个样本所使用的硬币,那我们就有完整的信息可以估计\(\theta_A\)和\(\theta_B\)。
假设我们做了5次实验,每次向上的次数记录成向量\(x\),并且使用的硬币顺序为\(A,A,B,A,B\)。他的似然函数为: \[ \begin{aligned} L(\theta_A,\theta_B)&= p(x_1; \theta_A)\cdot p(x_2; \theta_A)\cdot p(x_3; \theta_B) \cdot p(x_4; \theta_A) \cdot p(x_5; \theta_B) \\ &=B(n,\theta_A).pmf(x_1)\cdot B(n,\theta_A).pmf(x_2)\cdot B(n,\theta_B).pmf(x_3)\cdot B(n,\theta_A).pmf(x_4)\cdot B(n,\theta_B).pmf(x_5) \end{aligned} \] 其中二项分布的概率计算方式为: \[ \begin{aligned} \because X & \sim B(n,p)\\ \therefore P(X=k) &= \binom{n}{k} p^k (1-p)^{n-k} \\ &= C_n^k p^{k}(1-p)^{n-k} \end{aligned} \]
将似然函数对数化:
\[ \begin{aligned} L(\theta_A,\theta_B)=\log p(x_1; \theta_A) + \log p(x_2; \theta_A) +\log p(x_3; \theta_B) + \log p(x_4; \theta_A) +\log p(x_5; \theta_B) \end{aligned} \]
\(p(x_i; \theta)\)是二项式分布的概率质量函数,其中\(n=m,p=\theta\)。我们会使用\(z_i\)来表示第\(i\)个硬币的标签。
使用最小化函数求解似然
from numpy.core.umath_tests import matrix_multiply as mm
from scipy.optimize import minimize
from scipy.stats import bernoulli, binom
import numpy as np
import matplotlib.pyplot as plt
np.random.seed(1234)
""" 做五次实验 """
n = 10 # 每次实验投掷10次
theta_A = 0.8
theta_B = 0.3
theta_0 = [theta_A, theta_B]
# 两个硬币对应两个不同thta的二项分布
coin_A = bernoulli(theta_A)
coin_B = bernoulli(theta_B)
zs = [0, 0, 1, 0, 1] # 代表使用的硬币为哪个
# 得到实验结果
xs = np.array([np.sum(coin.rvs(n)) for coin in [coin_A, coin_A, coin_B, coin_A, coin_B]])
print(xs) # [7 9 2 6 0]
""" 精确求解 """
# 计算所有的硬币A朝上的比例作为概率
ml_A = np.sum(xs[[0, 1, 3]]) / (3.0 * n)
# 计算所有的硬币B朝上的比例作为概率
ml_B = np.sum(xs[[2, 4]]) / (2.0 * n)
print(ml_A, ml_B) # 0.7333333333333333 0.1
""" 数值估计 """
def neg_loglik(thetas, n, xs, zs):
""" 对数似然计算函数
这里的的二项分布是次数为n,概率可能为 theta_A 或 theta_B。
将每个二项分布对应x的对数概率密度函数求和后取相反数,接下来就是最小化此函数即可。
"""
logpmf = -np.sum([binom(n, thetas[z]).logpmf(x) for (x, z) in zip(xs, zs)])
return logpmf
bnds = [(0, 1), (0, 1)]
# 使用优化策略进行最小化求解
res = minimize(neg_loglik, [0.5, 0.5], args=(n, xs, zs),
bounds=bnds, method='tnc', options={'maxiter': 100})
print(res)
""" fun: 7.655267754139319
jac: array([-7.31859018e-05, -7.58504370e-05])
message: 'Converged (|f_n-f_(n-1)| ~= 0)'
nfev: 17
nit: 6
status: 1
success: True
x: array([0.73333285, 0.09999965]) """可以发现似然估计的估计值相当近似与精确计算所得到的结论。
当信息缺失时的最大似然
当我们没有记录实验所使用的硬币种类时,这个问题的解决就开始困难起来了。有一种解决问题的方式就是我们根据这个样本是由\(A\)或\(B\)产生的来给每个样本假设权重\(\boldsymbol{w}_i\)。直觉上来想,权重应该是\(\boldsymbol{z}_i\)的后验分布: \[ \begin{aligned} w_i = p(z_i \ | \ x_i; \theta) \end{aligned} \]
假设我们有\(\theta\)的一些估计值,如果我们知道\(z_i\),那我们就可以估计出\(\theta\),因为我们相当于拥有了全部的似然信息。EM算法的基本思想就是先猜测\(\theta\),然后计算出\(z_i\),接着继续更新\(\theta\)再计算\(z_i\),重复数次直到收敛。
非书面的表述:首先考虑一个对数似然函数作为曲线(曲面),他的\(x\)轴表示\(\theta\)。找到另一个\(\theta\)的函数\(\boldsymbol{Q}\),他是对数似然函数的下界,在特定的\(\theta\)值时对数似然函数与函数\(\boldsymbol{Q}\)接触。接下来找到这个\(\theta\)的值,并且使函数\(\boldsymbol{Q}\)最大化,重复这个过程,是下界函数\(\boldsymbol{Q}\)和对数似然函数的最大值相同,那么我们就得到了最大对数似然~
从下图可以理解,每次迭代都能找到新的下界函数\(\boldsymbol{Q}\)和当前最大的对数似然,等到迭代到一定程度时,就找到了全局的最大的对数似然。
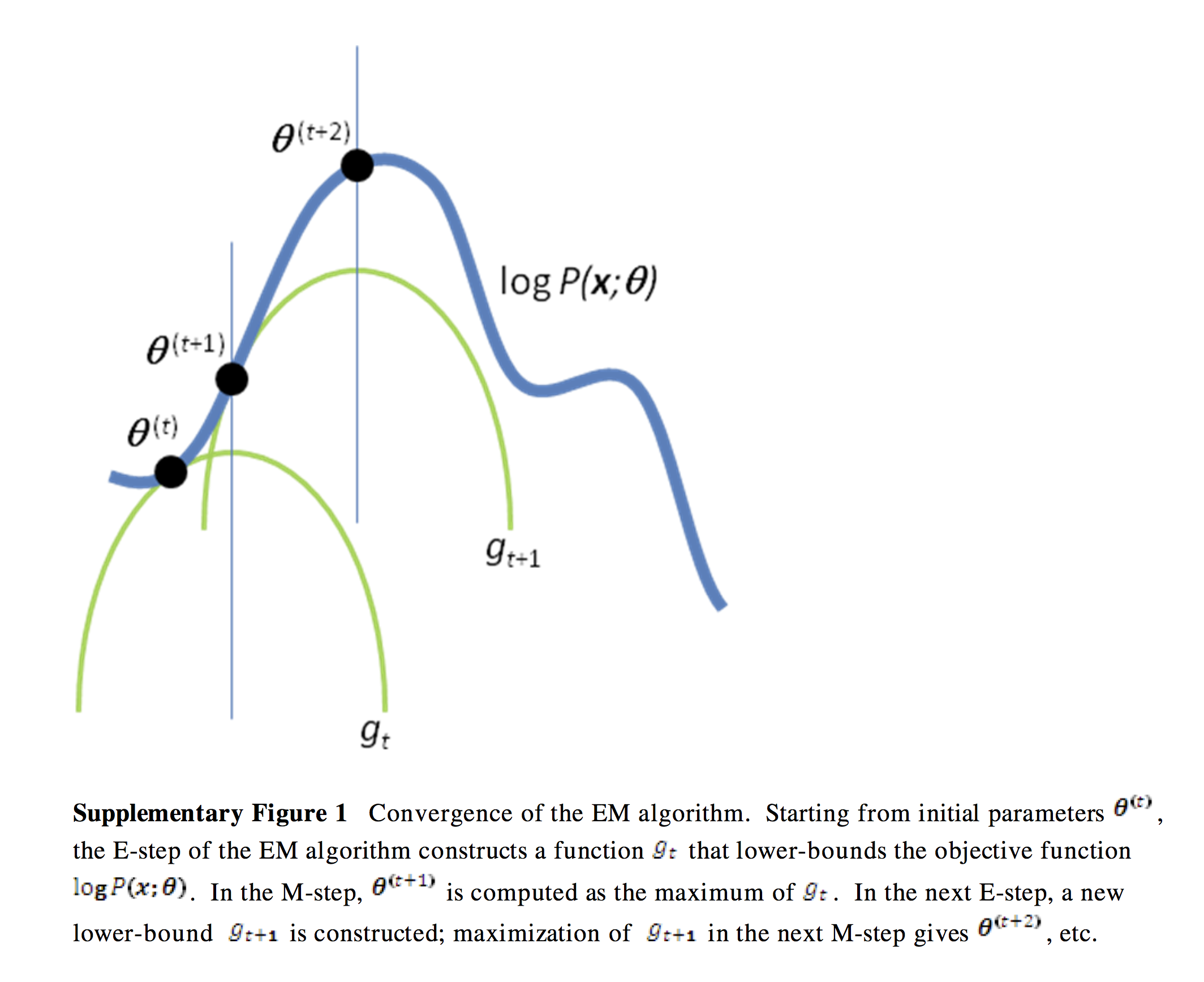
当然,还有个问题就是如何找到这个对数似然函数的下界函数\(\boldsymbol{Q}\),这就需要使用詹森不等式来进行数学推理。
推导
在EM算法的E-step中,我们确定一个函数,他是对数似然的下界。 \[
\begin{align}
l &= \sum_i{\log p(x_i; \theta)} && \text{定义对数似然函数} \\
&= \sum_i \log \sum_{z_i}{p(x_i, z_i; \theta)} && \text{在函数中加入隐变量$z$} \\
&= \sum_i \log \sum_{z_i} Q_i(z_i) \frac{p(x_i, z_i; \theta)}{Q_i(z_i)} && \text{贝叶斯定理得$Q_i$为$z_i$分布} \\
&= \sum_i \log E_{z_i}[\frac{p(x_i, z_i; \theta)}{Q_i(z_i)}] && \text{得到期望 - 就是EM中的E} \\
&\geq \sum E_{z_i}[\log \frac{p(x_i, z_i; \theta)}{Q_i(z_i)}] && \text{使用詹森不等式计算凹的对数似然函数} \\
&\geq \sum_i \sum_{z_i} Q_i(z_i) \log \frac{p(x_i, z_i; \theta)}{Q_i(z_i)} && \text{得到期望的定义}
\end{align}
\]
我们如何确定分布\(\boldsymbol{Q_i}\)?我们想要\(\boldsymbol{Q}\)函数与对数似然函数进行接触,并且也知道了詹森不等式相等的充要条件就是这个函数为常数,因此:
\[ \begin{align} \frac{p(x_i, z_i; \theta)}{Q_i(z_i)} =& c \\ \implies Q_i(z_i) &\propto p(x_i, z_i; \theta)\\ \implies Q_i(z_i) &= \frac{p(x_i, z_i; \theta) }{\sum_{z_i}{p(x_i, z_i; \theta) } } &&\text{因为 $\boldsymbol{Q}$ 是个分布且和为1} \\ \implies Q_i(z_i) &= \frac{p(x_i, z_i; \theta) }{ {p(x_i, \theta) } } && \text{边缘化 $z_i$}\\ \implies Q_i(z_i) &= p(z_i | x_i; \theta) && \text{根据条件概率定义} \end{align} \]
因此得到\(\boldsymbol{Q_i}\)就是\(z_i\)的后验概率,这就完成了E-step。
在M-step中,我找到最大化对数似然函数下界时的\(\theta\)值,然后我们迭代E和M即可。
所以EM算法是在缺少信息的情况下最大化似然的优化算法,或者说他可以很方便的添加隐变量来简化最大似然计算。
例子
现在如果我们忘记记录了投掷硬币的顺序,那我们来求解一波A、B硬币向上的概率。 对于E-step,我们:
\[ \begin{align} w_j &= Q_i(z_i = j) \\ &= p(z_i = j \mid x_i; \theta) \\ &= \frac{p(x_i \mid z_i = j; \theta) p(z_i = j; \phi)} {\sum_{l=1}^k{p(x_i \mid z_i = l; \theta) p(z_i = l; \phi) } } && \text{贝叶斯准则} \\ &= \frac{\theta_j^h(1-\theta_j)^{n-h} \phi_j}{\sum_{l=1}^k \theta_l^h(1-\theta_l)^{n-h} \phi_l} && \text{代入二项分布公式} \\ &= \frac{\theta_j^h(1-\theta_j)^{n-h} }{\sum_{l=1}^k \theta_l^h(1-\theta_l)^{n-h} } && \text{为了简单起见使 $\phi$ 为常数} \end{align} \]
对于M-step,我们需要找到最大时的\(\theta\)值。
\[ \begin{align} & \sum_i \sum_{z_i} Q_i(z_i) \log \frac{p(x_i, z_i; \theta)}{Q_i(z_i)} \\ &= \sum_{i=1}^m \sum_{j=1}^k w_j \log \frac{p(x_i \mid z_i=j; \theta) \, p(z_i = j; \phi)}{w_j} \\ &= \sum_{i=1}^m \sum_{j=1}^k w_j \log \frac{\theta_j^h(1-\theta_j)^{n-h} \phi_j}{w_j} \\ &= \sum_{i=1}^m \sum_{j=1}^k w_j \left( h \log \theta_j + (n-h) \log (1-\theta_j) + \log \phi_j - \log w_j \right) \end{align} \]
我们使用区间的方式解决\(\theta_s\)导数消失的问题: \[ \begin{align} \sum_{i=1}^m w_s \left( \frac{h}{\theta_s} - \frac{n-h}{1-\theta_s} \right) &= 0 \\ \implies \theta_s &= \frac {\sum_{i=1}^m w_s h}{\sum_{i=1}^m w_s n} \end{align} \]
第一种直接的代码
xs = np.array([(5, 5), (9, 1), (8, 2), (4, 6), (7, 3)])
thetas = np.array([[0.6, 0.4], [0.5, 0.5]]) # 初始化参数A B (向上概率,向下概率)
tol = 0.01 # 变化容忍度
max_iter = 100 # 迭代次数
ll_old = 0
for i in range(max_iter):
exp_A = []
exp_B = []
ll_new = 0
# ! E-step: 计算可能的概率分布
for x in xs:
# 求解当前theta下两个分布的对数似然
ll_A = np.sum(x * np.log(thetas[0])) # 多项式分布的对数似然函数 (忽略常数).
ll_B = np.sum(x * np.log(thetas[1]))
w_A = np.exp(ll_A) / (np.exp(ll_A) + np.exp(ll_B)) # 求出概率A的权重
w_B = np.exp(ll_B) / (np.exp(ll_A) + np.exp(ll_B)) # 求出概率B的权重
exp_A.append(w_A * x) # 概率A权重乘上样本
exp_B.append(w_B * x) # 概率B权重乘上样本
ll_new += w_A * ll_A + w_B * ll_B # 计算当前的theta值对应的似然值
# ! M-step: 为给定的分布更新当前参数
thetas[0] = np.sum(exp_A, 0) / np.sum(exp_A) # 利用更新之后的样本值计算出当前A的theta值
thetas[1] = np.sum(exp_B, 0) / np.sum(exp_B) # 利用更新之后的样本值计算出当前B的theta值
# 输出每个x和当前参数估计z的分布
print("Iteration: %d" % (i + 1))
print("theta_A = %.2f, theta_B = %.2f, ll = %.2f" % (thetas[0, 0], thetas[1, 0], ll_new))
if np.abs(ll_new - ll_old) < tol:
break
ll_old = ll_new结果
Iteration: 1
theta_A = 0.71, theta_B = 0.58, ll = -32.69
Iteration: 2
theta_A = 0.75, theta_B = 0.57, ll = -31.26
Iteration: 3
theta_A = 0.77, theta_B = 0.55, ll = -30.76
Iteration: 4
theta_A = 0.78, theta_B = 0.53, ll = -30.33
Iteration: 5
theta_A = 0.79, theta_B = 0.53, ll = -30.07
Iteration: 6
theta_A = 0.79, theta_B = 0.52, ll = -29.95
Iteration: 7
theta_A = 0.80, theta_B = 0.52, ll = -29.90
Iteration: 8
theta_A = 0.80, theta_B = 0.52, ll = -29.88
Iteration: 9
theta_A = 0.80, theta_B = 0.52, ll = -29.87NOTE: 他这里的对数似然函数是根据上面的公式推导之后简化而来的,所以直接对\(\theta\)做对数即可,下面我按最基本的思路来写了一个例程。
我的代码
n = 10 # 实验次数
m_xs = np.array([5, 9, 8, 4, 7]) # 向上次数
theta_A = 0.6
theta_B = 0.5
tol = 0.01 # 变化容忍度
max_iter = 100 # 迭代次数
loglike_old = 0 # 初始对数似然值
for i in range(max_iter):
cnt_A = []
cnt_B = []
loglike_new = 0 # 新的对数似然值
# ! E-step
for x in m_xs:
pmf_A = binom(n, theta_A).pmf(x) # 当前theta下 A的概率
pmf_B = binom(n, theta_B).pmf(x) # 当前theta下 B的概率
logpmf_A = binom(n, theta_A).logpmf(x) # 当前theta下 A的对数概率
logpmf_B = binom(n, theta_B).logpmf(x) # 当前theta下 B的对数概率
weight_A = pmf_A / (pmf_A + pmf_B) # 求得权重
weight_B = pmf_B / (pmf_A + pmf_B) # 求得权重
cnt_A.append(weight_A * np.array([x, n - x])) # 概率A权重乘上样本,得到新的硬币次数统计
cnt_B.append(weight_B * np.array([x, n - x])) # 概率B权重乘上样本,得到新的硬币次数统计
loglike_new += weight_A * logpmf_A + weight_B * logpmf_B # 计算当前的theta值对应的似然值
# ! M-step
theta_A = np.sum(cnt_A, 0)[0] / np.sum(cnt_A) # 硬币A向上的次数除以总次数即为theta_A
theta_B = np.sum(cnt_B, 0)[0] / np.sum(cnt_B) # 硬币B向上的次数除以总次数即为theta_B
# 输出每个x和当前参数估计z的分布
print("Iteration: %d" % (i + 1))
print("theta_A = %.2f, theta_B = %.2f, ll = %.2f" % (theta_A, theta_B, loglike_new))
if np.abs(loglike_new - loglike_old) < tol:
break
loglike_old = loglike_new结果
Iteration: 1
theta_A = 0.71, theta_B = 0.58, ll = -10.91
Iteration: 2
theta_A = 0.75, theta_B = 0.57, ll = -9.49
Iteration: 3
theta_A = 0.77, theta_B = 0.55, ll = -8.99
Iteration: 4
theta_A = 0.78, theta_B = 0.53, ll = -8.56
Iteration: 5
theta_A = 0.79, theta_B = 0.53, ll = -8.30
Iteration: 6
theta_A = 0.79, theta_B = 0.52, ll = -8.18
Iteration: 7
theta_A = 0.80, theta_B = 0.52, ll = -8.13
Iteration: 8
theta_A = 0.80, theta_B = 0.52, ll = -8.11
Iteration: 9
theta_A = 0.80, theta_B = 0.52, ll = -8.10NOTE: 就是对数似然值和例程计算的不一样。。
混合模型
从一个简单的混合模型开始,即k-means,k-means不使用EM算法,但是可以结合EM算法帮助理解EM算法如何用于高斯混合模型。
K-means
这个算法比较简单,初始化选择\(k\)个中心点,然后做如下:
- 找到每个点与中心点的距离
- 给每个点分配最近的中心点
- 根据所分配的点来更新中心点位置
下面给出一段程序示例:
from numpy.core.umath_tests import inner1d
import numpy as np
import seaborn as sns
def kmeans(xs, k, max_iter=10):
"""K-means 算法."""
idx = np.random.choice(len(xs), k, replace=False)
cs = xs[idx]
for n in range(max_iter):
ds = np.array([inner1d(xs - c, xs - c) for c in cs])
zs = np.argmin(ds, axis=0)
cs = np.array([xs[zs == i].mean(axis=0) for i in range(k)])
return (cs, zs)
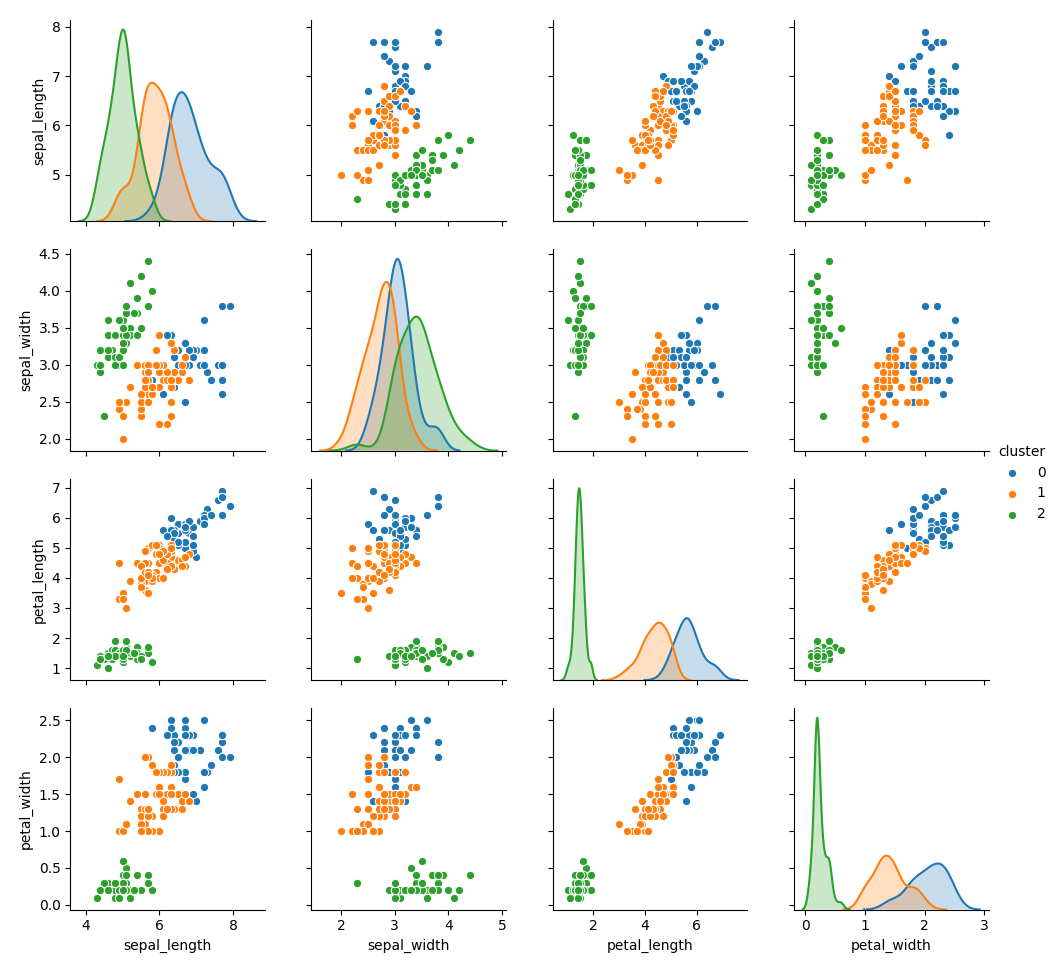
iris = sns.load_dataset('iris')
data = iris.iloc[:, :4].values
cs, zs = kmeans(data, 3)
iris['cluster'] = zs
sns.pairplot(iris, hue='cluster', diag_kind='kde', vars=iris.columns[:4])
plt.show()结果
高斯混合模型
\(k\)个高斯分布混合具有以下的概率密度函数: \[ \begin{align} p(x) = \sum_{j=1}^k \pi_j \phi(x; \mu_j, \sigma_j) \end{align} \]
\(\pi_j\)是第\(j\)个高斯分布的权重,且:
\[ \begin{align} \phi(x; \mu, \sigma) = \frac{1}{(2 \pi)^{d/2}|\sigma|^{1/2 } } \exp \left( -\frac{1}{2}(x-\mu)^T\sigma^{-1}(x-\mu) \right) \end{align} \]
假设我们观察\(y_1, y2, \ldots, y_n\)作为来自高斯混合模型的样本,那么对数似然为: \[ \begin{align} l(\theta) = \sum_{i=1}^n \log \left( \sum_{j=1}^k \pi_j \phi(y_i; \mu_j, \sigma_j) \right) \end{align} \]
其中\(\theta = (\pi, \mu, \sigma)\),很难拟合这种对数似然最大值的参数,因为他们要在对数函数中求和。
使用EM算法
假设我们增加潜在变量\(z\),它表明我们观察到的\(y\)来自于第\(k\)个高斯分布。其中E-step和M-step的推导与之前的例子类似,只是变量更多。
在E-step我们想要计算样本\(x_i\)输入第\(j\)个类别的后验概率,给定参数\(\theta =(\pi,\mu,\sigma)\)
NOTE: 这里后验概率有的地方使用公式\(p(j|x_i)\),这里使用\(w_j^i\)来表示。
\[ \begin{align} w_j^i &= Q_i(z^i = j) \\ &= p(z^i = j \mid y^i; \theta) \\ &= \frac{p(x^i \mid z^i = j; \mu, \sigma) p(z^i = j; \pi)} {\sum_{l=1}^k{p(y^i \mid z^i = l; \mu, \sigma) p(z^i = l; \pi) } } && \text{贝叶斯定理} \\ &= \frac{\phi(x^i; \mu_j, \sigma_j) \pi_j}{\sum_{l=1}^k \phi(x^i; \mu_l, \sigma_l) \pi_l} \end{align} \]
在M-step中,我们要找到\(\theta = (w, \mu, \sigma)\)来最大化\(\boldsymbol{Q}\)函数,对应与真实对数似然函数的下界。
\[ \begin{align} \sum_{i=1}^{m}\sum_{j=1}^{k} Q(z^i=j) \log \frac{p(x^i \mid z^i= j; \mu, \sigma) p(z^i=j; \pi)}{Q(z^i=j)} \end{align} \]
通过分别取\((w, \mu, \sigma)\)的导数并求解(使用拉格朗日乘数构造约束\(\sum_{j=1}^k w_j = 1\)来求解),我们得到:
\[ \begin{align} \pi_j &= \frac{1}{m} \sum_{i=1}^{m} w_j^i \\ \mu_j &= \frac{\sum_{i=1}^{m} w_j^i x^i}{\sum_{i=1}^{m} w_j^i} \\ \sigma_j &= \frac{\sum_{i=1}^{m} w_j^i (x^i - \mu)(x^i - \mu)^T}{\sum_{i1}^{m} w_j^i} \end{align} \]
代码
from scipy.stats import multivariate_normal
def normalize(xs, axis=None):
"""Return normalized marirx so that sum of row or column (default) entries = 1."""
if axis is None:
return xs / xs.sum()
elif axis == 0:
return xs / xs.sum(0)
else:
return xs / xs.sum(1)[:, None]
def mix_mvn_pdf(xs, pis, mus, sigmas):
return np.array([pi * multivariate_normal(mu, sigma).pdf(xs) for (pi, mu, sigma) in zip(pis, mus, sigmas)])
def em_gmm_orig(xs, pis, mus, sigmas, tol=0.01, max_iter=100):
n, p = xs.shape
k = len(pis)
ll_old = 0
for i in range(max_iter):
exp_A = []
exp_B = []
ll_new = 0
# ! E-step
ws = np.zeros((k, n))
for j in range(len(mus)):
for i in range(n):
# 遍历所有的 mu,sigma,pi 来计算概率密度
ws[j, i] = pis[j] * multivariate_normal(mus[j], sigmas[j]).pdf(xs[i])
ws /= ws.sum(0) # 根据概率密度求权值
# M-step
# NOTE 下面的更新过程是根据公式来计算的!
pis = np.zeros(k)
for j in range(len(mus)):
for i in range(n):
pis[j] += ws[j, i] # 使用权值更新pi
pis /= n
mus = np.zeros((k, p))
for j in range(k):
for i in range(n):
mus[j] += ws[j, i] * xs[i] # 使用权值更新mu
mus[j] /= ws[j, :].sum()
sigmas = np.zeros((k, p, p))
for j in range(k):
for i in range(n):
ys = np.reshape(xs[i] - mus[j], (2, 1))
sigmas[j] += ws[j, i] * np.dot(ys, ys.T) # 使用权值更新sigma
sigmas[j] /= ws[j, :].sum()
# 更新对数似然函数
ll_new = 0.0
for i in range(n):
s = 0
for j in range(k):
s += pis[j] * multivariate_normal(mus[j], sigmas[j]).pdf(xs[i])
ll_new += np.log(s)
if np.abs(ll_new - ll_old) < tol:
break
ll_old = ll_new
return ll_new, pis, mus, sigmas
# 构建数据集
n = 1000
_mus = np.array([[0, 4], [-2, 0]])
_sigmas = np.array([[[3, 0], [0, 0.5]], [[1, 0], [0, 2]]])
_pis = np.array([0.6, 0.4])
xs = np.concatenate([np.random.multivariate_normal(mu, sigma, int(pi * n))
for pi, mu, sigma in zip(_pis, _mus, _sigmas)])
# 初始化预测值
pis = normalize(np.random.random(2)) # pi 要经过归一化
mus = np.random.random((2, 2))
sigmas = np.array([np.eye(2)] * 2)
# 使用EM算法拟合
ll1, pis1, mus1, sigmas1 = em_gmm_orig(xs, pis, mus, sigmas)
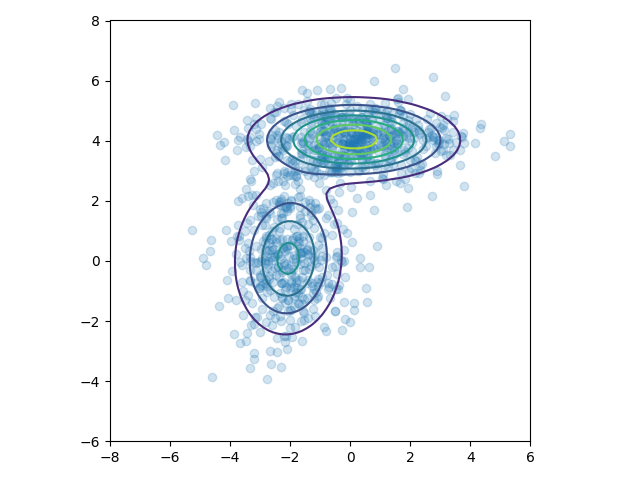
# 绘图
intervals = 101
ys = np.linspace(-8, 8, intervals)
X, Y = np.meshgrid(ys, ys)
_ys = np.vstack([X.ravel(), Y.ravel()]).T
z = np.zeros(len(_ys))
for pi, mu, sigma in zip(pis1, mus1, sigmas1):
z += pi * multivariate_normal(mu, sigma).pdf(_ys)
z = z.reshape((intervals, intervals))
ax = plt.subplot(111)
plt.scatter(xs[:, 0], xs[:, 1], alpha=0.2)
plt.contour(X, Y, z, N=10)
plt.axis([-8, 6, -6, 8])
ax.axes.set_aspect('equal')
plt.tight_layout()
plt.show()结果
胶囊网络
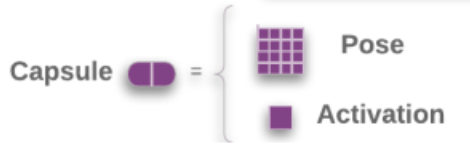
矩阵胶囊
现在的矩阵胶囊与之前的胶囊不是很一样了,因为胶囊是矩阵,就不能把模长作为激活了。所以多加一个标量\(a\)来表示激活值。
矩阵胶囊的主体,名字也变了一下,叫做姿态矩阵,这里是\(4\times4\)的矩阵。
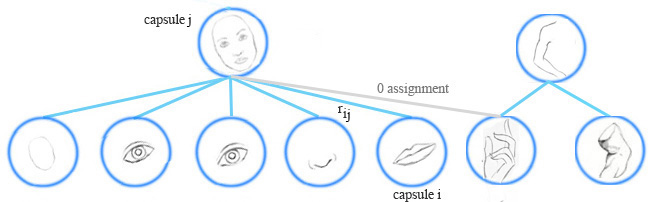
胶囊投票机制
在胶囊网络中,通过寻找底层胶囊投票之间的一致性来检测一个高层特征(比如一张脸),对于来自胶囊\(i\)对父胶囊\(j\)的投票\(\boldsymbol{V}_{ij}\),通过将胶囊\(i\)的姿态矩阵\(\boldsymbol{P}_i\)和视角不变矩阵\(W_{ij}\)相乘得到。
\[ \begin{split} &\boldsymbol{V}_{ij} =\boldsymbol{P}_i W_{ij} \quad \end{split} \]
基于投票\(\boldsymbol{V}_{ij}\)和其他投票\((\boldsymbol{V}_{o_{1}j} \ldots \boldsymbol{V}_{o_{k}j})\)相似度来计算胶囊\(i\)被分组到胶囊\(j\)中的概率。
胶囊分配
EM算法对低层的胶囊进行聚类,也计算底层胶囊与上层胶囊间分配概率\(r_{ij}\)。例如一个表示手的胶囊不属于脸的胶囊,他们的分配概率就被抑止到0,\(r_{ij}\)也受到胶囊激活的影响。
计算胶囊激活和姿态矩阵
在EM聚类中,我们将数据使用正态分布来表现。在EM路由中,我们也对父胶囊使用正态分布来建模,姿态矩阵\(M\)是\(4\times4\)的矩阵,即16个分量。我们对姿态矩阵建立16个\(\mu\),16个\(\sigma\)的高斯分布,每个\(\mu\)就表征了姿态矩阵的每个分量。注意为了避免在概率密度函数中求逆,胶囊网络中的\(\sigma\)是被固定成一个对角矩阵的。
让\(v_{ij}\)作为底层胶囊\(i\)对父胶囊\(j\)的投票,\(v^{n}_{ij}\)代表着第n个分量。我们使用高斯概率密度函数
\[ \begin{split} P(x) & = \frac{1}{\sigma \sqrt{2\pi } }e^{-(x - \mu)^{2}/2\sigma^{2} } \\ \end{split} \]
来计算属于胶囊\(j\)正态分布的投票\(v^{n}_{ij}\)概率。 \[ \begin{split} p^n_{i \vert j} & = \frac{1}{\sqrt{2 \pi ({\sigma^n_j})^2 } } \exp{(- \frac{(v^n_{ij}-\mu^n_j)^2}{2 ({\sigma^n_j})^2})} \\ \end{split} \]
取其对数:
\[ \begin{split} \ln(p^n_{i \vert j}) &= \ln \frac{1}{\sqrt{2 \pi ({\sigma^n_j})^2 } } \exp{(- \frac{(v^n_{ij}-\mu^n_j)^2}{2 ({\sigma^n_j})^2})} \\ \\ &= - \ln(\sigma^n_j) - \frac{\ln(2 \pi)}{2} - \frac{(v^n_{ij}-\mu^n_j)^2}{2 ({\sigma^n_j})^2}\\ \end{split} \]
接下来估计胶囊激活的损失值,越低的损失值,代表胶囊越有可能被激活。如果损失值较大,就代表投票与父胶囊的高斯分布不匹配,因此激活概率较小。
让\(cost_{ij}\)作为胶囊\(i\)激活胶囊\(j\)的损失,是负的对数似然也可以称之为熵(熵越小,那就意味似然估计越准): \[ cost^n_{ij} = - \ln(P^n_{i \vert j}) \]
由于胶囊\(i\)与胶囊\(j\)之间的联系并不相同,因此我们将在运行时按比例\(r_{ij}\)来分配\(cost\),那下层胶囊的\(cost\)计算为:
\[ \begin{split} cost^n_j &= \sum_i r_{ij} cost^n_{ij} \\ &= \sum_i - r_{ij} \ln(p^n_{i \vert j}) \\ &= \sum_i r_{ij} \big( \frac{(v^n_{ij}-\mu^n_j)^2}{2 ({\sigma^n_j})^2} + \ln(\sigma^n_j) + \frac{\ln(2 \pi)}{2} \big)\\ &= \frac{\sum_i r_{ij} (\sigma^n_j)^2}{2 (\sigma^n_j)^2} + (\ln(\sigma^n_j) + \frac{\ln(2 \pi)}{2}) \sum_i r_{ij} \\ &= \big(\ln(\sigma^n_j) + \beta_v \big) \sum_i r_{ij} \quad \beta_v\text{是待优化参数} \end{split} \]
有了\(cost\)值,使用\(a_j\)来决定胶囊\(j\)是否被激活: \[ a_j = sigmoid(\lambda(\beta_a - \sum_h cost^n_j)) \]
这里面的\(\beta_a,\beta_v\)是根据反向传播进行优化的,所以并不需要直接计算。
其中的\(r_{ij},\mu,\sigma,a_j\)是根据EM路由来计算的。\(\lambda\)是根据温度参数\(\frac{1}{temperature}\)来计算(退火策略),随着\(r_{ij}\)越来越好,就降低temperature以获得更大的\(\lambda\),也就是增加\(sigmoid\)的陡度,这样就更加在更加小的范围内微调\(r_{ij}\)。
EM路由
这一块是重点,所以我要仔细看每个公式细节。并且要一步一步的渐进的看。
新动态路由1
首先用一个矩阵\(\boldsymbol{P}_{i}, i=1,\ldots,n\)来表示第\(l\)层的胶囊,用矩阵\(\boldsymbol{M}_j, j=1,\ldots,k\)来表示第\(l+1\)层的胶囊。在做EM路由的过程中,他将\(P_i\)变成长16的向量,且协方差矩阵为对角阵。
\[ \begin{aligned} &p_{ij} \leftarrow N(\boldsymbol{P}_i;\boldsymbol{\mu}_j,\boldsymbol{\sigma}^2_j) && \text{计算概率密度} \\ &R_{ij} \leftarrow \frac{\pi_j p_{ij} }{\sum\limits_{j=1}^k\pi_j p_{ij} } && \text{计算后验概率} \\ &r_{ij}\leftarrow \frac{R_{ij } }{\sum\limits_{i=1}^n R_{ij } } && \text{计算归一化后验概率} \\ &\boldsymbol{M}_j \leftarrow \sum\limits_{i=1}^n r_{ij}\boldsymbol{P}_i && \text{计算新样本} \\ &\boldsymbol{\sigma}^2_j \leftarrow \sum\limits_{i=1}^n r_{ij}(\boldsymbol{P}_i-\boldsymbol{M}_j)^2 && \text{更新}\sigma \\ &\pi_j \leftarrow \frac{1}{n}\sum\limits_{i=1}^n R_{ij} && \text{更新聚类中心}\pi \end{aligned} \]
这里的\(R_{ij}\)就是后验概率,也就是在EM算法中使用的\(w_j\)。
新动态路由2
前面讲道理有一个激活标量\(a_j\)来衡量胶囊单元的显著程度,根据EM算法计算我们可以得到\(\pi_j\)为第\(l+1\)层胶囊的聚类中心,但我们不能选择\(\pi\)因为:
- \(\pi_j\)是归一化的,就是我们只想得到他的显著程度,而不是显著程度的概率。
- \(\pi_j\)不能反映出类内的元素特征是否相似。
现在再看前面所使用的激活标量\(a_j\),他既考虑了似然估计值\(cost_j^h\),又考虑了显著程度\(\pi_j\)。所以作者直接将\(a_j\)替换了\(\pi_j\),这样虽然不完全与原始EM算法相同,但是也能收敛,得到新的动态路由:
\[ \begin{aligned} &p_{ij} \leftarrow N(\boldsymbol{P}_i;\boldsymbol{\mu}_j,\boldsymbol{\sigma}^2_j) && \text{计算概率密度} \\ &R_{ij} \leftarrow \frac{a_j p_{ij} }{\sum\limits_{j=1}^k a_j p_{ij} } && \text{计算后验概率} \\ &r_{ij}\leftarrow \frac{R_{ij } }{\sum\limits_{i=1}^n R_{ij } } && \text{归一化后验概率} \\ &\boldsymbol{M}_j \leftarrow \sum\limits_{i=1}^n r_{ij}\boldsymbol{P}_i && \text{计算新样本} \\ &\boldsymbol{\sigma}^2_j \leftarrow \sum\limits_{i=1}^n r_{ij}(\boldsymbol{P}_i-\boldsymbol{M}_j)^2 && \text{更新}\sigma \\ & cost_j \leftarrow \left(\beta_v+\sum\limits_{l=1}^d \ln \boldsymbol{\sigma}_j^l \right)\sum\limits_i r_{ij} && \text{计算熵} \\ & a_j \leftarrow sigmoid(\lambda(\beta_a - \sum_h cost^h_j)) && \text{更新}a_j \end{aligned} \]
新动态路由3
上面好像没什么问题。但是没有使用底层胶囊的激活值\(a^{last}_i\),作者在计算归一化后验概率\(r_{ij}\leftarrow \frac{R_{ij } }{\sum\limits_{i=1}^n R_{ij } }\)的时候加入:
\[ \begin{aligned} &p_{ij} \leftarrow N(\boldsymbol{P}_i;\boldsymbol{\mu}_j,\boldsymbol{\sigma}^2_j) && \text{计算概率密度} \\ &R_{ij} \leftarrow \frac{a_j p_{ij} }{\sum\limits_{j=1}^k a_j p_{ij} } && \text{计算后验概率} \\ &r_{ij}\leftarrow \frac{a_i^{last}R_{ij } }{\sum\limits_{i=1}^n a_i^{last} R_{ij } } && \text{计算归一化后验概率} \\ &\boldsymbol{M}_j \leftarrow \sum\limits_{i=1}^n r_{ij}\boldsymbol{P}_i && \text{计算新样本} \\ &\boldsymbol{\sigma}^2_j \leftarrow \sum\limits_{i=1}^n r_{ij}(\boldsymbol{P}_i-\boldsymbol{M}_j)^2 && \text{更新}\sigma \\ & cost_j \leftarrow \left(\beta_v+\sum\limits_{l=1}^d \ln \boldsymbol{\sigma}_j^l \right)\sum\limits_i r_{ij} && \text{计算熵} \\ & a_j \leftarrow sigmoid(\lambda(\beta_a - \sum_h cost^h_j)) && \text{更新}a_j \end{aligned} \]
新动态路由4
因为\(\sum\limits_i r_{ij}=1\),所以下面还可以化简。
\[ \begin{aligned} &p_{ij} \leftarrow N(\boldsymbol{P}_i;\boldsymbol{\mu}_j,\boldsymbol{\sigma}^2_j) && \text{计算概率密度} \\ &R_{ij} \leftarrow \frac{a_j p_{ij} }{\sum\limits_{j=1}^k a_j p_{ij} } && \text{计算后验概率} \\ &r_{ij}\leftarrow \frac{a_i^{last}R_{ij } }{\sum\limits_{i=1}^n a_i^{last} R_{ij } } && \text{计算归一化后验概率} \\ &\boldsymbol{M}_j \leftarrow \sum\limits_{i=1}^n r_{ij}\boldsymbol{P}_i && \text{计算新样本} \\ &\boldsymbol{\sigma}^2_j \leftarrow \sum\limits_{i=1}^n r_{ij}(\boldsymbol{P}_i-\boldsymbol{M}_j)^2 && \text{更新}\sigma \\ & cost_j \leftarrow \left(\beta_v+\sum\limits_{l=1}^d \ln \boldsymbol{\sigma}_j^l \right)\sum\limits_i a_i^{last} R_{ij} && \text{计算熵} \\ & a_j \leftarrow sigmoid(\lambda(\beta_a - \sum_h cost^h_j)) && \text{更新}a_j \end{aligned} \]
最终的动态路由
现在再把投票机制与视角不变矩阵加入进来,投票矩阵与上面描述一样\(\boldsymbol{V}_{ij}=\boldsymbol{P}_{i}\boldsymbol{W}_{ij}\)。
\[ \begin{aligned} &p_{ij} \leftarrow N(\boldsymbol{V}_{ij};\boldsymbol{\mu}_j,\boldsymbol{\sigma}^2_j) && \text{计算概率密度} \\ &R_{ij} \leftarrow \frac{a_j p_{ij} }{\sum\limits_{j=1}^k a_j p_{ij} } && \text{计算后验概率} \\ &r_{ij}\leftarrow \frac{a_i^{last}R_{ij } }{\sum\limits_{i=1}^n a_i^{last} R_{ij } } && \text{计算归一化后验概率} \\ &\boldsymbol{M}_j \leftarrow \sum\limits_{i=1}^n r_{ij}\boldsymbol{V}_{ij} && \text{计算新样本} \\ &\boldsymbol{\sigma}^2_j \leftarrow \sum\limits_{i=1}^n r_{ij}(\boldsymbol{V}_{ij}-\boldsymbol{M}_j)^2 && \text{更新}\sigma \\ & cost_j \leftarrow \left(\beta_v+\sum\limits_{l=1}^d \ln \boldsymbol{\sigma}_j^l \right)\sum\limits_i a_i^{last} R_{ij} && \text{计算熵} \\ & a_j \leftarrow sigmoid(\lambda(\beta_a - \sum_h cost^h_j)) && \text{更新}a_j \end{aligned} \]
代码
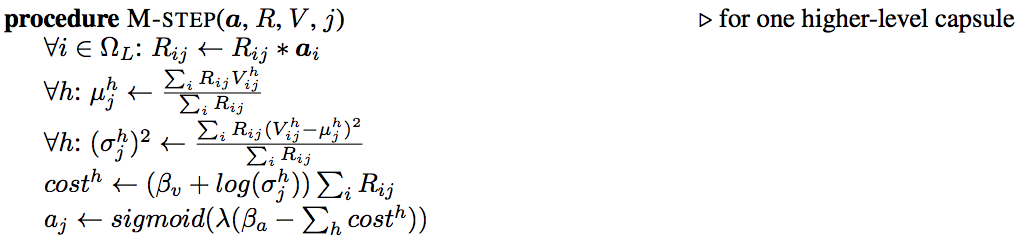
论文中的伪代码
官方的EM路由的顺序是和之前使用的EM算法不一样的,他先做M-step再做E-step,因为一开始我们是不知道父胶囊的分布,所以我们没有办法通过概率密度函数来计算后验分布,他这里比较简单粗暴,直接先把后验概率\(R_{ij}\)分配为1,再来算分配权重矩阵\(r_{ij}\)。 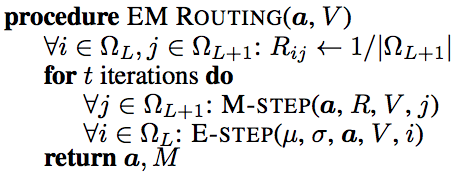
在M-step中计算出父胶囊正态分布的\(\mu,\sigma\)。然后计算熵\(cost\),再计算激活。
NOTE: 在论文或者tensorflow里面,\(log\)默认都是以\(e\)为底的。并且这里的h就是我上面用的n
在E-step中,我们有了之前的父胶囊的\(\mu,\sigma\),那我们根据正态分布公式计算概率密度\(p_{ij}\),然后贝叶斯公式更新后验概率\(R_{ij}\)。这样一个循环就形成了。 
python实现
使用Tensorflow 1.14直接运行即可。主要就是看EM算法的实现部分,当然这里在计算\(a_j\)的时候,用的是迂回的方式来计算,避免值溢出。我再尝试过这个算法之后,感觉真的不咋地,思路很高深,但是效果没有那些简单粗暴的算法好,我还是喜欢谷歌提出一些网络,虽然没那么多数学原理,但是很直接有效。不过这个笔记对我拿来写论文还是很有帮助的。
import numpy as np
import tensorflow.python as tf
import tensorflow.contrib.slim as slim
from tensorflow.python.keras.datasets import mnist
from tensorflow.contrib.layers import xavier_initializer
epsilon = 1e-9
def conv2d(inputs, kernel, out_channels, stride, padding, name, is_train=True, activation_fn=None):
with slim.arg_scope([slim.conv2d], trainable=is_train):
with tf.variable_scope(name) as scope:
output = slim.conv2d(inputs,
num_outputs=out_channels,
kernel_size=[kernel, kernel], stride=stride, padding=padding,
scope=scope, activation_fn=activation_fn)
tf.logging.info(f"{name} output shape: {output.get_shape()}")
return output
def primary_caps(inputs, kernel_size, out_capsules, stride, padding, pose_shape, name):
"""This constructs a primary capsule layer using regular convolution layer.
:param inputs: shape (N, H, W, C) (?, 14, 14, 32)
:param kernel_size: Apply a filter of [kernel, kernel] [5x5]
:param out_capsules: # of output capsule (32)
:param stride: 1, 2, or ... (1)
:param padding: padding: SAME or VALID.
:param pose_shape: (4, 4)
:param name: scope name
:return: (P, a), (P (?, 14, 14, 32, 4, 4), a (?, 14, 14, 32))
"""
with tf.variable_scope(name) as scope:
# Generate the P matrics for the 32 output capsules
P = conv2d(
inputs,
kernel_size,
out_capsules * pose_shape[0] * pose_shape[1],
stride,
padding=padding,
name='pose_stacked'
)
input_shape = inputs.get_shape()
# Reshape 16 scalar values into a 4x4 matrix
P = tf.reshape(
P, shape=[-1, input_shape[-3], input_shape[-2], out_capsules, pose_shape[0], pose_shape[1]],
name='P'
)
# Generate the activation for the 32 output capsules
a = conv2d(
inputs,
kernel_size,
out_capsules,
stride,
padding=padding,
activation_fn=tf.sigmoid,
name='activation'
)
tf.summary.histogram(
'a', a
)
# P (?, 14, 14, 32, 4, 4), a (?, 14, 14, 32)
return P, a
def kernel_tile(input, kernel, stride):
"""This constructs a primary capsule layer using regular convolution layer.
:param inputs: shape (?, 14, 14, 32, 4, 4)
:param kernel: 3
:param stride: 2
:return output: (?, 5, 5, 3x3=9, 136)
"""
# (?, 14, 14, 32x(16)=512)
input_shape = input.get_shape()
size = input_shape[4] * input_shape[5] if len(input_shape) > 5 else 1
input = tf.reshape(input, shape=[-1, input_shape[1], input_shape[2], input_shape[3] * size])
input_shape = input.get_shape()
# (3, 3, 512, 9)
tile_filter = np.zeros(shape=[kernel, kernel, input_shape[3],
kernel * kernel], dtype=np.float32)
for i in range(kernel):
for j in range(kernel):
tile_filter[i, j, :, i * kernel + j] = 1.0 # (3, 3, 512, 9)
# (3, 3, 512, 9)
tile_filter_op = tf.constant(tile_filter, dtype=tf.float32)
# (?, 6, 6, 4608)
output = tf.nn.depthwise_conv2d(input, tile_filter_op, strides=[
1, stride, stride, 1], padding='VALID')
output_shape = output.get_shape()
output = tf.reshape(output, shape=[-1, output_shape[1], output_shape[2], input_shape[3], kernel * kernel])
output = tf.transpose(output, perm=[0, 1, 2, 4, 3])
# (?, 6, 6, 9, 512)
return output
# import tensorflow.python as tf
def mat_transform(inputs, output_cap_size, size):
"""Compute the vote.
:param inputs: shape (size, 288, 16)
:param output_cap_size: 32
:return V: (24, 5, 5, 3x3=9, 136)
"""
caps_num_i = int(inputs.get_shape()[1]) # 288
P = tf.reshape(inputs, shape=[size, caps_num_i, 1, 4, 4]) # (size, 288, 1, 4, 4)
W = slim.variable('W', shape=[1, caps_num_i, output_cap_size, 4, 4], dtype=tf.float32,
initializer=tf.truncated_normal_initializer(mean=0.0, stddev=1.0)) # (1, 288, 32, 4, 4)
W = tf.tile(W, [size, 1, 1, 1, 1]) # (24, 288, 32, 4, 4)
P = tf.tile(P, [1, 1, output_cap_size, 1, 1]) # (size, 288, 32, 4, 4)
V = tf.matmul(P, W) # (24, 288, 32, 4, 4)
V = tf.reshape(V, [size, caps_num_i, output_cap_size, 16]) # (size, 288, 32, 16)
return V
def coord_addition(V, H, W):
"""Coordinate addition.
:param V: (24, 4, 4, 32, 10, 16)
:param H, W: spaital height and width 4
:return V: (24, 4, 4, 32, 10, 16)
"""
coordinate_offset_hh = tf.reshape(
(tf.range(H, dtype=tf.float32) + 0.50) / H, [1, H, 1, 1, 1]
)
coordinate_offset_h0 = tf.constant(
0.0, shape=[1, H, 1, 1, 1], dtype=tf.float32
)
coordinate_offset_h = tf.stack(
[coordinate_offset_hh, coordinate_offset_h0] + [coordinate_offset_h0 for _ in range(14)], axis=-1
) # (1, 4, 1, 1, 1, 16)
coordinate_offset_ww = tf.reshape(
(tf.range(W, dtype=tf.float32) + 0.50) / W, [1, 1, W, 1, 1]
)
coordinate_offset_w0 = tf.constant(
0.0, shape=[1, 1, W, 1, 1], dtype=tf.float32
)
coordinate_offset_w = tf.stack(
[coordinate_offset_w0, coordinate_offset_ww] + [coordinate_offset_w0 for _ in range(14)], axis=-1
) # (1, 1, 4, 1, 1, 16)
# (24, 4, 4, 32, 10, 16)
V = V + coordinate_offset_h + coordinate_offset_w
return V
def conv_capsule(inputs, shape, strides, iterations, batch_size, name):
""" This constructs a convolution capsule layer from a primary or convolution capsule layer.
i: input capsules (32)
o: output capsules (32)
batch size: 24
spatial dimension: 14x14
kernel: 3x3
:param inputs: a primary or convolution capsule layer with poses and a_j
pose: (24, 14, 14, 32, 4, 4)
activation: (24, 14, 14, 32)
:param shape: the shape of convolution operation kernel, [kh, kw, i, o] = (3, 3, 32, 32)
:param strides: often [1, 2, 2, 1] (stride 2), or [1, 1, 1, 1] (stride 1).
:param iterations: number of iterations in EM routing. 3
:param name: name.
:return: (poses, a_j).
"""
P, a_last = inputs
with tf.variable_scope(name) as scope:
stride = strides[1] # 2
i_size = shape[-2] # 32
o_size = shape[-1] # 32
pose_size = P.get_shape()[-1] # 4
# Tile the input capusles' pose matrices to the spatial dimension of the output capsules
# Such that we can later multiple with the transformation matrices to generate the V.
P = kernel_tile(P, 3, stride) # (?, 14, 14, 32, 4, 4) -> (?, 6, 6, 3x3=9, 32x16=512)
# Tile the a_j needed for the EM routing
a_last = kernel_tile(a_last, 3, stride) # (?, 14, 14, 32) -> (?, 6, 6, 9, 32)
spatial_size = int(a_last.get_shape()[1]) # 6
# Reshape it for later operations
P = tf.reshape(P, shape=[-1, 3 * 3 * i_size, 16]) # (?, 9x32=288, 16)
a_last = tf.reshape(a_last, shape=[-1, spatial_size, spatial_size, 3 * 3 * i_size]) # (?, 6, 6, 9x32=288)
with tf.variable_scope('V') as scope:
# Generate the V by multiply it with the transformation matrices
V = mat_transform(P, o_size, size=batch_size * spatial_size * spatial_size) # (864, 288, 32, 16)
# Reshape the vote for EM routing
V_shape = V.get_shape()
V = tf.reshape(
V,
shape=[batch_size, spatial_size,
spatial_size, V_shape[-3],
V_shape[-2], V_shape[-1]]) # (24, 6, 6, 288, 32, 16)
tf.logging.info(f"{name} V shape: {V.get_shape()}")
with tf.variable_scope('routing') as scope:
# beta_v and beta_a one for each output capsule: (1, 1, 1, 32)
beta_v = tf.get_variable(
name='beta_v', shape=[1, 1, 1, o_size], dtype=tf.float32,
initializer=xavier_initializer()
)
beta_a = tf.get_variable(
name='beta_a', shape=[1, 1, 1, o_size], dtype=tf.float32,
initializer=xavier_initializer()
)
# Use EM routing to compute the pose and activation
# V (24, 6, 6, 3x3x32=288, 32, 16), a_last (?, 6, 6, 288)
# poses (24, 6, 6, 32, 16), activation (24, 6, 6, 32)
M, a_j = matrix_capsules_em_routing(
V, a_last, beta_v, beta_a, iterations, name='em_routing'
)
# Reshape it back to 4x4 pose matrix
poses_shape = M.get_shape()
# (24, 6, 6, 32, 4, 4)
M = tf.reshape(
M, [
poses_shape[0], poses_shape[1], poses_shape[2], poses_shape[3], pose_size, pose_size
]
)
tf.logging.info(f"{name} pose shape: {M.get_shape()}")
tf.logging.info(f"{name} a_j shape: {a_j.get_shape()}")
return M, a_j
def class_capsules(inputs, num_classes, iterations, batch_size, name):
"""
:param inputs: ((24, 4, 4, 32, 4, 4), (24, 4, 4, 32))
:param num_classes: 10
:param iterations: 3
:param batch_size: 24
:param name:
:return poses, a_j: poses (24, 10, 4, 4), activation (24, 10).
"""
P, a_last = inputs # (24, 4, 4, 32, 4, 4), (24, 4, 4, 32)
P_shape = P.get_shape()
spatial_size = int(P_shape[1]) # 4
pose_size = int(P_shape[-1]) # 4
i_size = int(P_shape[3]) # 32
# P (24*4*4=384, 32, 16)
P = tf.reshape(P, shape=[batch_size * spatial_size * spatial_size, P_shape[-3], P_shape[-2] * P_shape[-2]])
with tf.variable_scope(name) as scope:
with tf.variable_scope('V') as scope:
# P (384, 32, 16)
# V: (384, 32, 10, 16)
V = mat_transform(P, num_classes, size=batch_size * spatial_size * spatial_size)
tf.logging.info(f"{name} V shape: {V.get_shape()}")
# V (24, 4, 4, 32, 10, 16)
V = tf.reshape(V, shape=[batch_size, spatial_size, spatial_size, i_size, num_classes, pose_size * pose_size])
# (24, 4, 4, 32, 10, 16)
V = coord_addition(V, spatial_size, spatial_size)
tf.logging.info(f"{name} V shape with coord addition: {V.get_shape()}")
with tf.variable_scope('routing') as scope:
# beta_v and beta_a one for each output capsule: (1, 10)
beta_v = tf.get_variable(
name='beta_v', shape=[1, num_classes], dtype=tf.float32,
initializer=xavier_initializer()
)
beta_a = tf.get_variable(
name='beta_a', shape=[1, num_classes], dtype=tf.float32,
initializer=xavier_initializer()
)
# V (24, 4, 4, 32, 10, 16) -> (24, 512, 10, 16)
V_shape = V.get_shape()
V = tf.reshape(V, shape=[batch_size, V_shape[1] * V_shape[2] * V_shape[3], V_shape[4], V_shape[5]])
# a_last (24, 4, 4, 32) -> (24, 512)
a_last = tf.reshape(a_last, shape=[batch_size,
V_shape[1] * V_shape[2] * V_shape[3]])
# V (24, 512, 10, 16), a_last (24, 512)
# poses (24, 10, 16), activation (24, 10)
M, a_j = matrix_capsules_em_routing(
V, a_last, beta_v, beta_a, iterations, name='em_routing'
)
# M (24, 10, 16) -> (24, 10, 4, 4)
M = tf.reshape(M, shape=[batch_size, num_classes, pose_size, pose_size])
# M (24, 10, 4, 4), activation (24, 10)
return M, a_j
def matrix_capsules_em_routing(V, a_last, beta_v, beta_a, iterations, name):
"""The EM routing between input capsules (i) and output capsules (j).
:param V: (N, OH, OW, kh x kw x i, o, 4 x 4) = (24, 6, 6, 3x3*32=288, 32, 16)
:param i_activation: activation from Level L (24, 6, 6, 288)
:param beta_v: (1, 1, 1, 32)
:param beta_a: (1, 1, 1, 32)
:param iterations: number of iterations in EM routing, often 3.
:param name: name.
:return: (pose, activation) of output capsules.
"""
V_shape = V.get_shape().as_list()
with tf.variable_scope(name) as scope:
# Match R_ij (routing assignment) shape, a_last shape with V shape for broadcasting in EM routing
# R_ij 就是后验概率
# R_ij: [3x3x32=288, 32, 1]
# R_ij: routing matrix from each input capsule (i) to each output capsule (o)
R_ij = tf.constant(
1.0 / V_shape[-2], shape=V_shape[-3:-1] + [1], dtype=tf.float32
)
# a_last: expand_dims to (24, 6, 6, 288, 1, 1)
a_last = a_last[..., tf.newaxis, tf.newaxis]
# beta_v and beta_a: expand_dims to (1, 1, 1, 1, 32, 1]
beta_v = beta_v[..., tf.newaxis, :, tf.newaxis]
beta_a = beta_a[..., tf.newaxis, :, tf.newaxis]
def m_step(R_ij, V, a_last, beta_v, beta_a, inverse_temperature):
"""The M-Step in EM Routing from input capsules i to output capsule j.
i: input capsules (32)
o: output capsules (32)
h: 4x4 = 16
output spatial dimension: 6x6
:param R_ij: routing assignments. shape = (kh x kw x i, o, 1) =(3x3x32, 32, 1) = (288, 32, 1)
:param V. shape = (N, OH, OW, kh x kw x i, o, 4x4) = (24, 6, 6, 288, 32, 16)
:param a_last: input capsule activation (at Level L). (N, OH, OW, kh x kw x i, 1, 1) = (24, 6, 6, 288, 1, 1)
with dimensions expanded to match V for broadcasting.
:param beta_v: Trainable parameters in computing cost (1, 1, 1, 1, 32, 1)
:param beta_a: Trainable parameters in computing next level activation (1, 1, 1, 1, 32, 1)
:param inverse_temperature: lambda, increase over each iteration by the caller.
:return: (M, sigma, o_activation)
"""
# 用于计算归一化后验概率的零时变量
R_ij_a_last = R_ij * a_last
# R_ij_a_last_sum: sum over all input capsule i
R_ij_a_last_sum = tf.reduce_sum(R_ij_a_last, axis=-3, keepdims=True, name='R_ij_a_last_sum')
# 计算聚类中心,也就是新样本
M = tf.reduce_sum(R_ij_a_last * V, axis=-3, keepdims=True) / R_ij_a_last_sum
# 计算输出方差sigma: sigma (24, 6, 6, 1, 32, 16)
sigma = tf.sqrt(
tf.reduce_sum(
R_ij_a_last * tf.square(V - M), axis=-3, keepdims=True
) / R_ij_a_last_sum
)
# 计算每component的差异 cost_n: (24, 6, 6, 1, 32, 16)
cost_n = (beta_v + tf.log(sigma + epsilon)) * R_ij_a_last_sum
# cost: (24, 6, 6, 1, 32, 1)
# 计算求和得到熵
cost = tf.reduce_sum(cost_n, axis=-1, keepdims=True)
# NOTE 为了数值上的稳定性 计算输出激活值a_j的时候,利用分布之间的差异来算
cost_mu = tf.reduce_mean(cost, axis=-2, keepdims=True)
# 这是熵的sigma
cost_sigma = tf.sqrt(
tf.reduce_sum(
tf.square(cost - cost_mu), axis=-2, keepdims=True
) / cost.get_shape().as_list()[-2]
)
# 计算激活值之间的差异性 a_cost = (24, 6, 6, 1, 32, 1)
a_cost = beta_a + (cost_mu - cost) / (cost_sigma + epsilon)
# 归一化激活值 (24, 6, 6, 1, 32, 1)
a_j = tf.sigmoid(inverse_temperature * a_cost)
return M, sigma, a_j
def e_step(M, sigma, a_j, V):
"""The E-Step in EM Routing.
:param M: (24, 6, 6, 1, 32, 16)
:param sigma: (24, 6, 6, 1, 32, 16)
:param a_j: (24, 6, 6, 1, 32, 1)
:param V: (24, 6, 6, 288, 32, 16)
:return: R_ij
"""
o_p_unit0 = - tf.reduce_sum(tf.square(V - M) / (2 * tf.square(sigma)), axis=-1, keepdims=True)
o_p_unit2 = - tf.reduce_sum(tf.log(sigma + epsilon), axis=-1, keepdims=True)
# 求出概率 p_ij
# (24, 6, 6, 1, 32, 16)
p_ij = o_p_unit0 + o_p_unit2
# R_ij: (24, 6, 6, 288, 32, 1)
zz = tf.log(a_j + epsilon) + p_ij
# 求出后验概率
R_ij = tf.nn.softmax(zz, dim=len(zz.get_shape().as_list()) - 2)
return R_ij
# inverse_temperature schedule (min, max)
it_min = 1.0
it_max = min(iterations, 3.0)
for it in range(iterations):
inverse_temperature = it_min + (it_max - it_min) * it / max(1.0, iterations - 1.0)
M, sigma, a_j = m_step(
R_ij, V, a_last, beta_v, beta_a, inverse_temperature=inverse_temperature
)
if it < iterations - 1:
R_ij = e_step(
M, sigma, a_j, V
)
# pose: (N, OH, OW, o 4 x 4) via squeeze M (24, 6, 6, 32, 16)
M = tf.squeeze(M, axis=-3)
# activation: (N, OH, OW, o) via squeeze o_activationis [24, 6, 6, 32]
a_j = tf.squeeze(a_j, axis=[-3, -1])
return M, a_j
def capsules_net(inputs, num_classes, iterations, batch_size, name='capsule_em'):
"""Define the Capsule Network model
"""
with tf.variable_scope(name) as scope:
# ReLU Conv1
# Images shape (24, 28, 28, 1) -> conv 5x5 filters, 32 output channels, strides 2 with padding, ReLU
# nets -> (?, 14, 14, 32)
nets = conv2d(
inputs,
kernel=5, out_channels=32, stride=2, padding='SAME',
activation_fn=tf.nn.relu, name='relu_conv1'
)
# PrimaryCaps
# (?, 14, 14, 32) -> capsule 1x1 filter, 32 output capsule, strides 1 without padding
# nets -> (poses (?, 14, 14, 32, 4, 4), activations (?, 14, 14, 32))
nets = primary_caps(
nets,
kernel_size=1, out_capsules=32, stride=1, padding='VALID',
pose_shape=[4, 4], name='primary_caps'
)
# ConvCaps1
# (poses, activations) -> conv capsule, 3x3 kernels, strides 2, no padding
# nets -> (poses (24, 6, 6, 32, 4, 4), activations (24, 6, 6, 32))
nets = conv_capsule(
nets, shape=[3, 3, 32, 32], strides=[1, 2, 2, 1], iterations=iterations,
batch_size=batch_size, name='conv_caps1'
)
# ConvCaps2
# (poses, activations) -> conv capsule, 3x3 kernels, strides 1, no padding
# nets -> (poses (24, 4, 4, 32, 4, 4), activations (24, 4, 4, 32))
nets = conv_capsule(
nets, shape=[3, 3, 32, 32], strides=[1, 1, 1, 1], iterations=iterations,
batch_size=batch_size, name='conv_caps2'
)
# Class capsules
# (poses, activations) -> 1x1 convolution, 10 output capsules
# nets -> (poses (24, 10, 4, 4), activations (24, 10))
nets = class_capsules(nets, num_classes, iterations=iterations,
batch_size=batch_size, name='class_capsules')
# poses (24, 10, 4, 4), activations (24, 10)
poses, activations = nets
return poses, activations
def spread_loss(labels, activations, iterations_per_epoch, global_step, name):
"""Spread loss
:param labels: (24, 10] in one-hot vector
:param activations: [24, 10], activation for each class
:param margin: increment from 0.2 to 0.9 during training
:return: spread loss
"""
# Margin schedule
# Margin increase from 0.2 to 0.9 by an increment of 0.1 for every epoch
margin = tf.train.piecewise_constant(
tf.cast(global_step, dtype=tf.int32),
boundaries=[
(iterations_per_epoch * x) for x in range(1, 8)
],
values=[
x / 10.0 for x in range(2, 10)
]
)
activations_shape = activations.get_shape().as_list()
with tf.variable_scope(name) as scope:
# mask_t, mask_f Tensor (?, 10)
mask_t = tf.equal(labels, 1) # Mask for the true label
mask_i = tf.equal(labels, 0) # Mask for the non-true label
# Activation for the true label
# activations_t (?, 1)
activations_t = tf.reshape(tf.boolean_mask(activations, mask_t), shape=(tf.shape(activations)[0], 1))
# Activation for the other classes
# activations_i (?, 9)
activations_i = tf.reshape(
tf.boolean_mask(activations, mask_i), [tf.shape(activations)[0], activations_shape[1] - 1]
)
l = tf.reduce_sum(tf.square(tf.maximum(0.0, margin - (activations_t - activations_i))))
tf.losses.add_loss(l)
return l
def preprocess_image(image, label):
""" Scale the image value between -1 and 1.
:param image: An image in Tensor.
:return A scaled image in Tensor.
"""
image = tf.to_float(image)
image = tf.subtract(image, 128.0)
image = tf.div(image, 128.0)
image = tf.reshape(image, (28, 28, 1))
label = tf.one_hot(label, 10)
return image, label
def load_batch(batch_size=32) -> [tf.Tensor, tf.Tensor]:
(x_train, y_train), (x_test, y_test) = mnist.load_data()
dataset = (tf.data.Dataset.from_tensor_slices((x_train, y_train))
.shuffle(10000, 66)
.repeat()
.map(preprocess_image)
.batch(batch_size)) # type: tf.data.Dataset
return dataset._make_one_shot_iterator().get_next()
def main():
tf.logging.set_verbosity(tf.logging.INFO)
seed = 66
batch_size = 8
log_dir = './log/train'
config = tf.ConfigProto()
config.gpu_options.allow_growth = True
np.random.seed(seed)
tf.set_random_seed(seed)
# Slim dataset contains data sources, decoder, reader and other meta-information
iterations_per_epoch = 60000 // batch_size # 60,000/24 = 2500
# images: Tensor (?, 28, 28, 1)
# labels: Tensor (?)
next_images, next_labels = load_batch(batch_size)
images = tf.placeholder_with_default(next_images, (batch_size, 28, 28, 1))
labels = tf.placeholder_with_default(next_labels, (batch_size, 10))
# poses: Tensor(?, 10, 4, 4) activations: (?, 10)
poses, activations = capsules_net(images, num_classes=10, iterations=3, batch_size=batch_size, name='capsules_em')
global_step = tf.train.get_or_create_global_step()
loss = spread_loss(labels, activations, iterations_per_epoch, global_step, name='spread_loss')
tf.summary.scalar('losses/spread_loss', loss)
optimizer = tf.train.AdamOptimizer(learning_rate=0.001)
train_tensor = slim.learning.create_train_op(loss, optimizer, global_step=global_step, clip_gradient_norm=4.0)
slim.learning.train(
train_tensor,
logdir=log_dir,
log_every_n_steps=10,
save_summaries_secs=60,
saver=tf.train.Saver(max_to_keep=2),
save_interval_secs=600,
session_config=config
)
if __name__ == '__main__':
main()